|
Кибернетика и программирование
Правильная ссылка на статью:
Хронусова Т.В., Асанов А.З., Назаренко М.А.
Бортовые информационно - управляющие системы, обеспечивающие автоматизацию движения автомобилей в колонне на примере большегрузных автомобилей
// Кибернетика и программирование.
2019. № 2.
С. 30-43.
DOI: 10.25136/2644-5522.2019.2.21490 URL: https://nbpublish.com/library_read_article.php?id=21490
Бортовые информационно - управляющие системы, обеспечивающие автоматизацию движения автомобилей в колонне на примере большегрузных автомобилей
Хронусова Татьяна Валерьевна
аналитик, индивидуальный предприниматель
614051, Россия, Пермский край, г. Пермь, ул. Юрша, 7
Khronusova Tatiana Valerievna
analyst, individual entrepreneur
614051, Russia, Permskii krai, g. Perm', ul. Yursha, 7

|
tatiana.khronusova@gmail.com
|
|
 |
Асанов Асхат Замилович
доктор технических наук
профессор кафедры Автоматические системы Московского Технологического Университета
119454, Россия, город Москва, г. Москва, ул. Проспект Вернадского, 78
Asanov Askhat Zamilovich
Doctor of Technical Science
Professor, Department of Automatic Systems, Moscow Technological University
119454, Russia, gorod Moscow, g. Moscow, ul. Prospekt Vernadskogo, 78
|
|
askhat.asanov@yandex.ru
|
|
 |
|
Назаренко Максим Анатольевич
кандидат физико-математических наук
Советник ректората, Московский Технологический Университет
119454, Россия, Москва, г. Москва, ул. Проспект Вернадского, 78
Nazarenko Maksim Anatolievich
PhD in Physics and Mathematics
Advisor to the Administration, Moscow Technological University
119454, Russia, Moscow, g. Moscow, ul. Prospekt Vernadskogo, 78
|
|
nazarenko@mirea.ru
|
|
 |
|
DOI: 10.25136/2644-5522.2019.2.21490
Дата направления статьи в редакцию:
20-12-2016
Дата публикации:
27-05-2019
Аннотация:
Предметом данной статьи являются бортовые информационно управляющие системы, обеспечивающие движение большегрузных автомобилей в колонне при наличии водителя только в первой машине, а также системы круиз-контроля, включая адаптивные и интеллектуальные. Целью статьи является формирование указанной бортовой системы большегрузного автомобиля, включающей в себя как набор алгоритмов и ключевых функций, реализующих движение в колонне, так и перечень используемых категорий датчиков. Все рассмотренные функции упорядочены иерархически на трех уровнях: стратегическом, тактическом и операционном. В исследовании собрана как теоретическая, так и практическая информация, предоставленная авто-производителями, раскрывающая сущностное содержание бортовых информационных системы и круиз-контроля. Новизна проведенного исследования заключается в том, что доработана модель интеллектуального круиз-контроля, обеспечивающая движение большегрузных автомобилей в колонне при наличии водителя только в первом автомобиле. Предлагаемая модель включает в себя иерархическую архитектуру бортовой информационно-управляющей системы, ключевые алгоритмы и датчики для ее реализации.
Ключевые слова:
бортовая информационно-управляющая система, алгоритм управления, датчик, движение в колонне, беспилотное движение, круиз-контроль, адаптивный круиз-контроль, интеллектуальный круиз-контроль, большегрузный автомобиль, иерархическая архитектура
Abstract: The subject of this article is on-board information control systems that ensure the movement of heavy vehicles in a convoy with the driver only in the first car, as well as cruise control systems, including adaptive and intelligent ones. The purpose of the article is the formation of the specified on-board system of a heavy truck, which includes both a set of algorithms and key functions that implement movement in a column, and a list of used categories of sensors. All considered functions are arranged hierarchically at three levels: strategic, tactical and operational. The study collected both theoretical and practical information provided by automakers, revealing the essential content of onboard information systems and cruise control. The novelty of the study lies in the fact that the model of intellectual cruise control has been improved, providing movement of heavy vehicles in a convoy, if there is a driver only in the first car. The proposed model includes the hierarchical architecture of the on-board information management system, key algorithms and sensors for its implementation.
Keywords: airborne management information system, control algorithm, sensor, movement in the column, unmanned motion, Cruise control, adaptive cruise control, intellectual cruise control, heavy vehicle, hierarchical architecture
Введение
На данный момент большая часть производителей автомобилей, используют технологии Controller Area Network (CAN), объединяющие различные системы автомобиля в единую сеть, включающую в себя как многообразные датчики, электронные управляющие устройства, микропроцессоры и микропроцессорные контроллеры [7] (рис. 1), так и систему управления ими. Бортовая информационно-управляющая система состоит из сбора информации об обстановке; обработке данной информации по алгоритмам, соответствующим состоянию объекта, среды и условий движения транспортного средства; выработки сигналов управления и управления объектом [17].
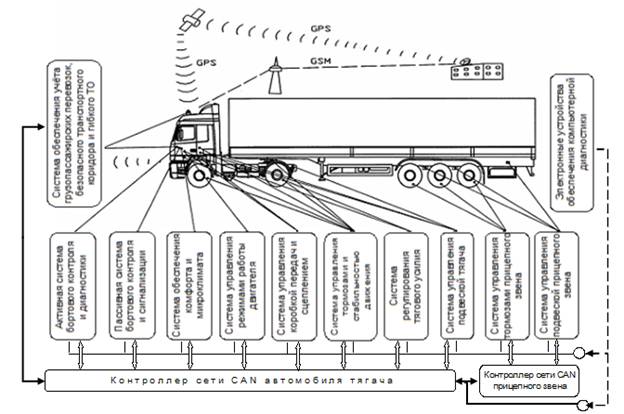
Рис. 1. Общая схема сети контроллеров CAN на большегрузных магистральных автомобилях
Данная система обрабатывает данные от GPS и GSM одновременно, а также измеряет расстояние до впереди идущего транспортного средства. При этом, каждая подсистема шины CAN имеет собственную внутреннюю шину. Так, к примеру, на легковых автомобилях Skoda функционируют подсистемы: CAN привода, CAN шасси, CAN extended, CAN комфорт и CAN информационно-командная. Пропускная способность шины CAN составляет около Кбит/с. Одновременно, в автомобили встроена вторая шина – LIN. Она более медленная (19,2 Кбит/с) и соединяет подушки безопасности, ремень безопасности, многофункциональное рулевое колесо, систему кондиционирования и магнитолу. Все эти функции, не смотря на их значимость в эксплуатации автомобиля, не столь чувствительны к скорости передачи данных, а также имеют более простую систему управления, используемую значительно реже [3]. Не смотря на высокую проработанность бортовых систем автомобилей, в том числе и грузовых, подобные системы на данный момент слабо изучены при движении машин в колонне и создании общей системы, позволяющей координировать действия автомобилей.
Постановка задачи
Целью данной статьи является разработка архитектуры бортовой информационно-управляющей системы, обеспечивающей автоматизацию движения большегрузных автомобилей в колонне при наличии водителя только в головной машине.
Задача движения большегрузных автомобилей в колонне включает в себя некоторое количество более простых, вложенных задач, в частности:
· соблюдение и поддержка дистанции при движении с учетом получаемой информации о характере движения и окружающей среде;
· обеспечение целостности колонны при движении и восстановление целостности в случае ее размыкания;
· отслеживание препятствий и посторонних транспортных средства, встраивающихся в колонну, и при необходимости торможение или изменение траектории движения для избегания столкновения;
· подстройка режимов ускорения и торможения в зависимости от типа перевозимого груза или его отсутствия;
· экономия топлива за счет сокращения дистанции между автомобилями при синхронизации движения в колонне.
Можно говорить, о том, что движение в колонне большегрузных автомобилей представляет собой более развитую систему, базирующуюся на существующих алгоритмах круиз-контроля [7], что относится к классу интеллектуальных систем управления автомобилем [11]. Каждая система подобного класса должна соотноситься с основными принципами структурной организации интеллектуальных систем управления [15]:
1. взаимодействие с окружающей внешней средой с использованием сети датчиков и информационных каналов связи;
2. наличие функций самонастройки, самоорганизации и самообучения;
3. наличие алгоритмов прогнозирования изменений окружающей среды и собственного поведения в динамически изменяющейся внешней среде;
4. наличие многоуровневой иерархической структуры;
5. стабильное функционирование при потере управляющих воздействий от высших уровней управляющей структуры.
Обзор существующих наработок по структурным схемам круиз-контроля
Классическая структура управления автомобилем представляет собой совокупность воздействий, оказываемых водителем на исполнительные механизмы (ИМi), включающие в себя воздействие на тормозную систему, коробку передач, двигатель, а также руль (рис.2.).
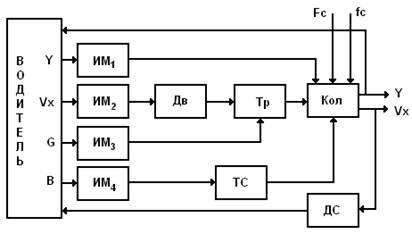
Рис. 2. Обобщенная структурная схема управления автомобиля
На структурной схеме: ИМi − исполнительные механизмы, Дв − двигатель, Тр − трансмиссия автомобиля, Кол − система колес, ДС − датчик скорости, ТС − тормозная система, Y − поперечная координата траектории движения автомобиля, Vx − продольная скорость движения автомобиля, G − коэффициент силовой передачи, В − тормозное воздействие, Fc − сила сопротивления движению автомобиля, fc − помеховые воздействия.
Важно указать, что фактическое воздействие на колеса осуществляется за счет всех четырех рассматриваемых исполнительных механизмов. При этом, воздействие от двигателя, в любом случае, структурно проходит через коробку передач. В то время как традиционные системы круиз-контроля грузовых автомобилей основаны на ПИД-алгоритмах. Обобщенная структурная схема системы управления автомобилем в режиме круиз-контроля представлена на рис. 3.
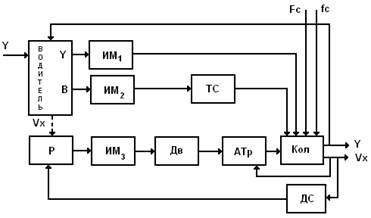
Рис. 3. Структура системы управления автомобиля в режиме круиз-контроля
На структурной схеме: ИМi − исполнительные механизмы, Дв − двигатель, , Кол − система колес, ДС − датчик скорости, ТС − тормозная система, Y − поперечная координата траектории движения автомобиля, Vx − продольная скорость движения автомобиля, G − коэффициент силовой передачи, В − тормозное воздействие, Fc − сила сопротивления движению автомобиля, fc − помеховые воздействия, Р − регулятор скорости (система круиз-контроля), АТр − автоматическая (автоматизированная) трансмиссия автомобиля.
Ключевым отличием от структурной схемы управления автомобилем является ограниченность действий водителя, который может воздействовать исключительно на колеса или же на тормозную систему. В то время как регулятор, то есть круиз-контроль поддерживает заданную скорость, за счет воздействия на двигатель. Подобная система также включает в себя автоматическую коробку передач, подстраивающуюся под работу двигателя. Кроме того, датчик скорости обеспечивает формирование системы с обратной связью, что позволяет определить соответствие фактического значения скорости заданному.
Большая часть систем классического и адаптивного круиз-контроля работает по жестким алгоритмам в достаточно узком диапазоне изменения ряда дорожных параметров, практически не осуществляет оптимизацию эксплуатационных характеристик автомобиля. Использование нечеткого регулятора вместо ПИД-регулятора [26] также не решает оптимизационных задач, хотя и дает определенное улучшение динамических характеристик регулирования скорости автомобиля [4]. Основной проблемой низкой эффективности таких регуляторов можно назвать недостаточность входящих данных [21]. В действительности, многие версии круиз-контроля представляют собой закрытую систему, включающую в себя анализ препятствий при движении лишь в ближайшей зоне видимости и не рассматривающий заданный маршрут с учетом специфики рельефа [12]. Так, в Audi первоначально водитель должен был самостоятельно настраивать дистанцию до впереди идущего автомобиля, и лишь затем она стала частично-зависимой от скорости движения [1]. Позднее системы стали более адаптивными, в частности, скорость реакции системы может быть изменена согласно предпочтениям водителя в пределах конструктивных ограничений [10]. Общая схема автомобиля, снабженного системой адаптивного круиз-контроля, представлена на рисунке 4 [9, 22].
Рис.4. Компоненты системы адаптивного круиз-контроля компании Bosch
На рисунке: 1 - ЕСU управления работой двигателя; 2 - блок проверки работы радиолокационного датчика; 3 - блок управления работай тормозов при включении круиз-контроля; 4 - контрольные приборы и блок индикации; 5 - блок управления двигателем при включении круиз-контроля; 6 - датчики; 7 - блок управления трансмиссией при включении круиз-контроля.
Схема адаптивного круиз-контроля компании Bosch представлена на рисунке 5 [5].
Рис. 5. Схема управления адаптивного круиз-контроля
Таким образом, принципиально важна разработка интеллектуального круиз-контроля (рис.6) [2].
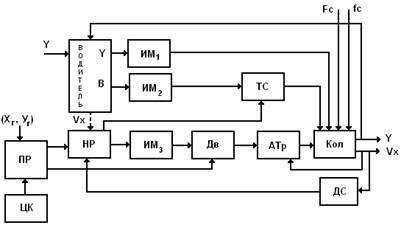
Рис. 6. Структура системы управления автомобиля с интеллектуальным круиз-контролем
На структурной схеме: ИМi − исполнительные механизмы, Дв − двигатель, , Кол − система колес, ДС − датчик скорости, ТС − тормозная система, Y − поперечная координата траектории движения автомобиля, Vx − продольная скорость движения автомобиля, G − коэффициент силовой передачи, В − тормозное воздействие, Fc − сила сопротивления движению автомобиля, fc − помеховые воздействия, АТр − автоматическая (автоматизированная) трансмиссия автомобиля, НР − нечеткий регулятор, ПР − процессор режимов автомобиля, ЦК − цифровая карта дороги, (Хг, Уг) − глобальные координаты местоположения автомобиля, определяемые по спутниковым данным.
В системе интеллектуального круиз-контроля используется информация со специализированных географических карт, интегрируемая с данными GPS [27]. Специализированные географические карты включают в себя данные о склонах дороги, поворотах и иной спецификации дорог. В итоге аппаратура и бортовой вычислитель смогут распознать рельеф дороги и организовать оптимальный режим работы двигателя и выбрать наилучший скоростной режим автомобиля [7].
Входными параметрами системы, включающей в себя дорожные карты и связь со спутниками GPS/GLONASS, являются [6]:
· координаты широты, долготы и высоты K={x, y, z} местоположения транспортного средства по данным средств спутниковой навигации М1 и М2;
· вектор настроечных параметров R системы оцифровки траектории движения;
· параметры метода аппроксимации W={mi, d} где mi – алгоритм аппроксимации, d – диапазон аппроксимируемых координат траектории движения;
· поток видеоинформации VR под передним мостом;
· вектор значений сигналов Zt в моменты времени t от одометра;
· вектор продольных и поперечных уклонов Gt={p, r} в моменты времени t от датчика угла наклона, установленного на задней оси.
Выходными параметрами системы являются: оцифрованная траектория движения мобильного объекта T, оценка погрешности ∆ позиционирования АТС, поток видеоинформации VR под передним мостом АТС, координаты K текущего местоположения АТС, углы наклона Gt={p, r} дорожного полотна.
Таким образом, система получает возможность прогнозирования дороги вне пределов видимости и действия дальномеров, на несколько километров вперед, что позволяет оптимизировать прикладываемое усилие, а также существенно экономить топливо.
Реализация данной системы представлена на рисунке 7.
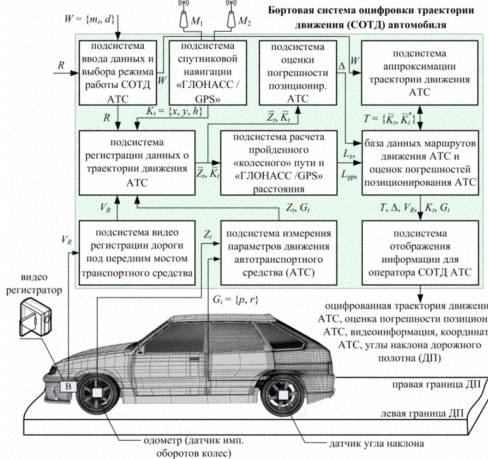
Рис.7. Структурная схема системы оцифровки траектории движения автомобиля с использованием средств спутниковой навигацией
Важной отличительной особенностью современных дальномеров, используемых в системах круиз-контроля, является то, что в зависимости от скорости движения, изменяется угол анализа дорожной ситуации. В общем случае, закономерность описывается следующим образом: по мере увеличения скорости, обозреваемый угол сокращается, при этом анализируемое расстояние увеличивается [20, 25]. Именно поэтому, для обеспечения безопасного движения на высокой скорости, плотность дальномеров необходимо увеличивать. В современных системах круиз-контроля на легковых автомобилях устанавливается более 6 датчиков в передней и задней частях автомобиля. Для большегрузных машин, такое число должно быть соответственно увеличено.
Архитектура разрабатываемой бортовой информационно-управляющей системы, обеспечивающей движение автомобилей в колонне
Бортовая информационно-управляющая система, обеспечивающая автоматизацию движения большегрузных автомобилей в колонне, стоится на основе существующих разработок в области интеллектуального круиз-контроля, развивая их. Система предполагает наличие водителя исключительно в первой машине и движение всех остальных машин в режиме, не требующем действий человека. Данная система также должна обладать GPS/ GLONASS датчиком в каждой машине, позволяющим отследить ее местоположение; цифровой специализированной картой местности с возможностью прокладывания на ней маршрута; датчиками состояния дорожного полотна; набором датчиков и систем диагностики каждого автомобиля, включающих все основные агрегаты, а также уровень давления в шинах; набором дальномеров, не оставляющих слепых зон при движении автомобиля, а также системой распознавания образов. При этом, наиболее важной системой обеспечения интегрированности информации является объединение всех автомобилей в единую wi-fi сеть с большим радиусом действия. В алгоритмах управления большегрузными автомобилями при движении в колонне также существенную роль играет возможность выбора типа груза или его отсутствия на программном уровне, что также позволяет адаптировать динамику движения автомобиля к текущим задачам.
Рассмотрим некоторые особенности функционирования предложенного набора датчиков и систем. В первую очередь, отметим, что маршрут может быть перестроен в процессе движения как по причине изменения конечного или промежуточного пункта назначения, так и за счет изменения дорожных условий. К примеру, появлению препятствий на пути, требующих объезда с использованием альтернативной дороги. Особенностью движения автомобилей в колонне, является возможность разрыва колонны. В случае разрыва колонны, впереди идущие машины должны получить информацию от отстающих и несколько снизить скорость движения. В то время как отстающая часть должна продолжать движение с заданной скоростью. Отметим, что все машины продолжают следование по маршруту, а водитель получает оповещение о том, что часть колонны отстает, а также о количестве отстающих машин.
Датчики состояния дорожного полотна измеряют толщину слоя воды, снега и льда на поверхности дорожного полотна, а также его температуру. Измерения слоя воды, снега и льда реализуется за счет анализа интенсивности отраженного сигнала от их поверхности, а температуры – за счет измерения интенсивности потока инфракрасного излучения с помощью пирометра [23]. По результатам измерений температуры поверхности дорожного полотна, толщины слоя воды, снега, льда микропроцессором рассчитывается коэффициент сцепления колес автомобиля с поверхностью дорожного полотна.
Большая часть современных большегрузных автомобилей обладают системами диагностики всех основных агрегатов. Однако форма предоставления информации рассчитана на наличие водителя в машине. В то время как при движении в колонне, предполагается наличие водителя только в первой машине. Именно поэтому, получаемая с датчиков информация должна в первую очередь обрабатываться нечетким регулятором, определяющим уровень неисправности автомобиля, а затем подаваться водителю первой машины, с учетом сформированного уровня оценки неисправности. По аналогии с технологиями, предлагаемыми компанией Tesla, для управления их беспилотным автомобилем, бортовая информационно-управляющая система будет выводить информацию водителю первой машины на мультимедийный планшет с функцией мультитача [10]. Подобная система вывода является одной из наиболее универсальных, а также легко расширяемых и настраиваемых под текущие задачи движения. Таким образом, в случае изменения набора получаемых сигналов с датчиков, издержки для вывода нового набора водителю будут минимальны.
Для примера приведем алгоритм системы диагностирования тормозной системы по параметрам эффективности (рис.8) [14].

Рис.8. Алгоритм системы диагностирования тормозной системы по параметрам эффективности
В случае, если произошел разрыв колонны, и датчики зафиксировали неисправность в автомобиле, движущемся без водителя, сигнал все равно передается водителю из первой машины и в случае отсутствия отклика, происходит остановка всей колонны.
Кроме того, одним из важнейших элементов бортовой информационно-управляющей системы является набором дальномеров, не оставляющих слепых зон при движении автомобиля. Дальномеры и информация, получаемая с них, является первичной при движении автомобиля в беспилотном режиме. Именно эта информация позволяет избегать столкновения или многих других проблем при движении. В случае, если система дальномеров фиксирует препятствие дальнейшему движению или его приближение, автомобиль останавливается или меняет траекторию движения. Сигнал головной машине передается в случае, если произошло ДТП или же в случае разрыва колонны в результате выполняемого маневра.
Система распознавания образов необходима для поддержания целостности колонны. Данная система позволяет распознавать сигналы светофоров и иные внешние сигналы, влияющие на движение колонны. Одновременно, в случае смыкания колонны после разрыва, присоединения дополнительных машин, или же встраивания в колонну посторонних транспортных средств, система распознает автомобили, принадлежащие к данной колонне или не принадлежащие к ней, и принимает положительно/отрицательное решение о следовании за впереди идущим транспортным средством. В случае встраивания посторонних транспортных средств в колонну, система активирует соответствующий алгоритм смыкания колонны.
Как уж указывалось ранее, важной частью алгоритмов управления движением большегрузных автомобилей в колонне является выбор типа груза, что может накладывать ограничения на характер движения.
Единая wi-fi сеть, обеспечивающая целостность информационного пространства колонны обеспечивает не только передачу информации о состоянии машин, но и управляющие воздействия. Ранее, уже указывалось, что в случае неисправности, водитель передает управляющее воздействие на автомобиль, однако данный тип воздействия скорее исключение, чем правило. В то время как сигналы о начале движения, торможении, ускорении и поворотах передаются от головной машины ко всем автомобилям в каждом случае. В результате, достигается повышение быстроты реакции, а также корректировки движения колонны в целом, что позволяет сократить и удерживать на минимальном уровне расстояние между автомобилями. По сути, подобная передача сигналов обеспечивает возможность синхронизации автомобилей. Отметим также, что, несмотря на синхронизацию, на более низком уровне в каждом большегрузном автомобиле постоянно функционирует система адаптивного и/ или интеллектуального круиз-контроля, включающая в себя нечеткий регулятор.
Таким образом, следуя логике иерархической бортовой системы управления большегрузным магистральным автомобилем можно выделить три уровня решаемых системой задач [8]:
· верхний, стратегический, сценарный;
· средний, тактический, ситуационный;
· нижний, оперативный, локальный.
На рисунке 9 представлена структурная иерархическая схема бортовой информационно-управляющей системы, реализующей движение большегрузных автомобилей в колонне. На первом уровне (I) отражены стратегические задачи, на втором (II) – тактические, а на третьем (III) – локальные.
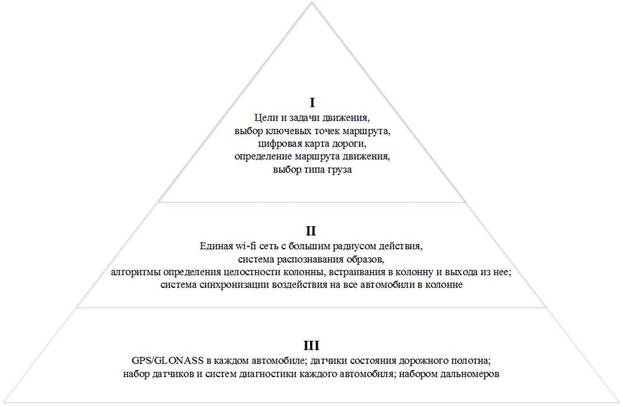
Рис.9. Структурная иерархическая схема бортовой информационно-управляющей системы, реализующей движение большегрузных автомобилей в колонне
На рисунке 9 представлены все рассмотренные выше датчики и алгоритмы управления, входящие в бортовую информационно-управляющую систему, реализующую движение большегрузных автомобилей в колонне, при условии, что водитель находится только в первой машине. Важно отметить, что в первую очередь реализуются процессы наиболее низкого уровня, а лишь затем более высокого. Иными словами, система избегания столкновения, реализующаяся за счет системы дальномеров и обработки данных с них, является приоритетной в сравнении с синхронизацией движения и следованию маршруту.
На рисунке 10 представлена структура системы управления автомобиля с бортовой управляющей системой, обеспечивающей движение большегрузных автомобилей в колонне. Отметим, что процессор и нечеткий регулятор на данной схеме рассматриваются как две части одного блока управления. Кроме того, учитывая объем различных внешних параметров, датчиков и систем управления, необходимых для обеспечения движения большегрузных автомобилей в колонне, с водителем только в первом автомобиле, их совокупность отражена упрощенной схемой рисунка 6 и представлена в виде трехуровневой пирамиды. При этом, сам алгоритм воздействия на основные агрегаты автомобилей при нормальном стабильном движении не изменяется. То есть, система управляет в автоматизированном режиме разгоном, торможением и траекторией движения. Ключевым отличием от движения с использованием системы интеллектуального круиз-контроля заключается в том, что за счет синхронизации на втором уровне бортовой информационно-управляющей системы, посредством решений, принимаемых процессором и нечетким регулятором, осуществляется прямое воздействие на колеса.
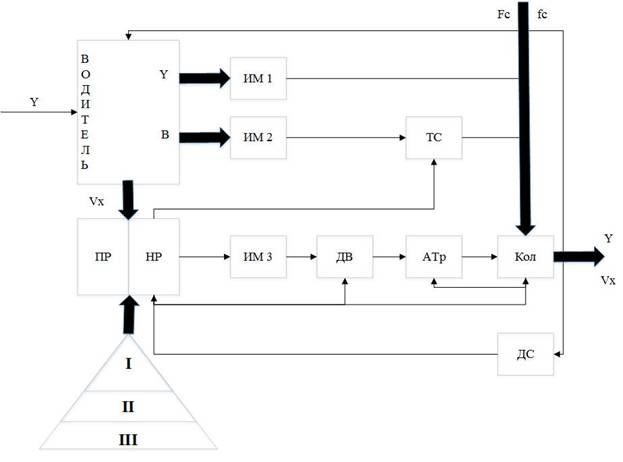
Рис. 10. Структура системы управления автомобиля с бортовой управляющей системой, обеспечивающей движение большегрузных автомобилей в колонне
На структурной схеме: ИМi − исполнительные механизмы, Дв − двигатель, Кол − система колес, ДС − датчик скорости, ТС − тормозная система, Y − поперечная координата траектории движения автомобиля, Vx − продольная скорость движения автомобиля, G − коэффициент силовой передачи, В − тормозное воздействие, Fc − сила сопротивления движению автомобиля, fc − помеховые воздействия, АТр − автоматическая (автоматизированная) трансмиссия автомобиля, НР − нечеткий регулятор, ПР − процессор режимов автомобиля, I - стратегические задачи, датчики и алгоритмы их реализующие; II – тактические задачи, датчики и алгоритмы их реализующие; III – локальные задачи, датчики и алгоритмы их реализующие.
Заключение
Таким образом, разрабатываемая бортовая информационно-управляющая система, реализующая движение большегрузных автомобилей в колонне, основана на существующих системах интеллектуального круиз-конроля, расширяя и дополняя их. Данная система, система позволяет обеспечивать движение в колоне при наличии водителя только в первом автомобиле, что существенно снижает издержки на перевозку грузов. При этом, синхронизация управляющих воздействий, подаваемых на двигатель, тормозную систему и колеса, позволяет сократить расстояние между автомобилями, что также влияет на снижение расхода топлива.
Важным элементом системы является ее иерархичность, где на верхнем уровне находятся стратегические задачи, на среднем – тактические, а на нижнем – локальные. При этом, в первую очередь реализуются процессы наиболее низкого уровня, а лишь затем более высокого.
Библиография
1. Audi. Системы адаптивного круиз-контроля. Материал по программе самообучения Audi №620 (другие данные отсутствуют). 43 с.
2. Rajamani R. Vehicle Dynamics and Control. Second Edition. Springer, 2012. 512 p.
3. Skoda Octavia III: Электронные системы. Учебный материал по программе самообучения Skoda № 98. 40 с.
4. Алексеев К.Б., Малявин А.А., Палагута К.А. Сравнительный анализ предикторного и нечеткого управлений движением автомобиля // Мехатроника, автоматизация, управление. 2009. №9. С. 36−45.
5. Аминев Р.Р. Синтез астатического регулятора для управления скоростью автомобиля с использованием прогнозирующей модели // Процессы управления и устойчивость. 2015. Т. 2. № 1. С. 352-356.
6. Аралбаев Т. З., Сарайкин А. И., Хасанов Р. И. Бортовая система оцифровки траектории движения автомобиля с использованием средств спутниковой навигации // Вестник ОГУ. 2014. №10 (171) С.8-14.
7. Асанов А.З. Структурный синтез системы интеллектуального управления скоростью магистрального автомобиля. [Текст] В монографии «Интеллектуальные системы управления» под ред. ак. С.Н. Васильева. М.: Машиностроение, 2010. 544 с.
8. Асанов А.З., Савинков А.С. Многоуровневые управление при автоматизированном движении автомобилей в караване. Материалы Международной научно-технической конференции "Искусственный интеллект. Интеллектуальные системы-2013" Кацивели, Донецк. изд. ИПИИ. 2013. С.134-135.
9. Бахарев Т.С., Шаталова Н.В. От адаптивных к когнитивным автотранспортным системам // Архивариус. 2016. № 3 (7). С. 28-30.
10. Борщенко А.Я., Васильев В.И. Электронные и микропроцессорные системы автомобилей. Курган: Изд-во Курганского гос. ун-та, 2007. 207 с.
11. Васильев С.Н., Жерлов А.К., Федосов Е.А., Федунов Б.Е. Интеллектное управление динамическими системами. - М.: Физматиздат. 2000. −352 с.
12. Заргарян Е.В., Заргарян Ю.А., Богатырев Н.С., Малышенко И.М. Разработка нечеткого контроллера, как дополнения к системе «круиз-контроль» // В сборнике: Теория и практика имитационного моделирования и создания тренажёров Пенза, 2015. С. 16-20.
13. Кобзев А.А., Мишулин Ю.Е., Соцков Д.А. «Автостоп» – система экстренного торможения // Автомобильная промышленность. 2011. №1. С. 14–16.
14. Комаров Д. Ю., Ревин А. А. Алгоритм диагностирования бортовыми средствами тормозной системы автомобиля по параметрам эффективности // Известия ВолгГТУ. 2011. №4 С.109-112.
15. Лохин В.М., Захаров В.И. Интеллектуальные системы управления: понятия, определения, принципы построения. В кн.: Интеллектуальные системы автоматического управления / Под ред. И.М. Макарова, В.М. Лохина. М.: Физматиздат, 2001. −576 с.
16. Ляхов С.В., Белоус М.М. Комплекс для исследования систем активной безопасности автомобиля // Мехатроника, автоматизация, управление. 2009. №5. С. 53–58.
17. Матов В.И. и др. Бортовые цифровые вычислительные машины и системы. М.: Высшая школа, 1988. 216 с.
18. Милушин Ю.Е. Аппаратная реализация бортовой информационно-управляющей системы транспортного средства [Текст] // Фундаментальные исследования. 2012. № 3. C. 113-119.
19. Основы технической диагностики // Модели объектов, методы и алгоритмы диагноза; под ред. П.П. Пархоменко. М.: Энергия, 1976. 464 с.
20. Парнес М. Применение радарных датчиков в автомобиле // Компоненты и технологии. 2008. № 78. С. 41-44.
21. Русинов А.С., Меркурьев Д.А., Поезжаева Е.В. Система адаптивного круиз-контроля на отечественные автомобили // Актуальные проблемы современной науки. 2015. № 3 (82). С. 321-323.
22. Смирнов О.П., Тропина А.А. Применение искусственного интеллекта в транспортных системах // Автомобиль и Электроника. Современные Технологии. 2013. № 2 (5). С. 34-37.
23. Соснен Д.А., Яковлев В.Ф. Новейшие автомобильные электронные системы. М.: СОЛОН-Пресс, 2005. 240 с.
24. Соцков Д.А., Мишулин Ю.Е., Тимофеева С.И. Повышение эффективности работы системы «автостоп» ИРМ в экстренных ситуациях // Состояние и перспективы развития средств разведки и преодоления минно-взрывных заграждений: сборник докладов научно-практической конференции. ФГУ «15 ЦНИИИ Минобороны России». Нахабино, 2009. С. 59–63.
25. Сысоева С. Актуальные технологии и применения датчиков автомобильных систем активной безопасности. Часть 7. Активные ИК системы: лидары, системы ночного видения, 3d – камеры // Компоненты и технологии. 2007. № 69. С. 19-26.
26. Тэрано Т., Асаи К.,Сугэно М. Прикладные нечеткие системы. М.: Мир. 1993. 368 с.
27. Фишетти М. Навигация будущего // В мире науки. 2008. № 2. С. 84-89.
References
1. Audi. Sistemy adaptivnogo kruiz-kontrolya. Material po programme samoobucheniya Audi №620 (drugie dannye otsutstvuyut). 43 s.
2. Rajamani R. Vehicle Dynamics and Control. Second Edition. Springer, 2012. 512 p.
3. Skoda Octavia III: Elektronnye sistemy. Uchebnyi material po programme samoobucheniya Skoda № 98. 40 s.
4. Alekseev K.B., Malyavin A.A., Palaguta K.A. Sravnitel'nyi analiz prediktornogo i nechetkogo upravlenii dvizheniem avtomobilya // Mekhatronika, avtomatizatsiya, upravlenie. 2009. №9. S. 36−45.
5. Aminev R.R. Sintez astaticheskogo regulyatora dlya upravleniya skorost'yu avtomobilya s ispol'zovaniem prognoziruyushchei modeli // Protsessy upravleniya i ustoichivost'. 2015. T. 2. № 1. S. 352-356.
6. Aralbaev T. Z., Saraikin A. I., Khasanov R. I. Bortovaya sistema otsifrovki traektorii dvizheniya avtomobilya s ispol'zovaniem sredstv sputnikovoi navigatsii // Vestnik OGU. 2014. №10 (171) S.8-14.
7. Asanov A.Z. Strukturnyi sintez sistemy intellektual'nogo upravleniya skorost'yu magistral'nogo avtomobilya. [Tekst] V monografii «Intellektual'nye sistemy upravleniya» pod red. ak. S.N. Vasil'eva. M.: Mashinostroenie, 2010. 544 s.
8. Asanov A.Z., Savinkov A.S. Mnogourovnevye upravlenie pri avtomatizirovannom dvizhenii avtomobilei v karavane. Materialy Mezhdunarodnoi nauchno-tekhnicheskoi konferentsii "Iskusstvennyi intellekt. Intellektual'nye sistemy-2013" Katsiveli, Donetsk. izd. IPII. 2013. S.134-135.
9. Bakharev T.S., Shatalova N.V. Ot adaptivnykh k kognitivnym avtotransportnym sistemam // Arkhivarius. 2016. № 3 (7). S. 28-30.
10. Borshchenko A.Ya., Vasil'ev V.I. Elektronnye i mikroprotsessornye sistemy avtomobilei. Kurgan: Izd-vo Kurganskogo gos. un-ta, 2007. 207 s.
11. Vasil'ev S.N., Zherlov A.K., Fedosov E.A., Fedunov B.E. Intellektnoe upravlenie dinamicheskimi sistemami. - M.: Fizmatizdat. 2000. −352 s.
12. Zargaryan E.V., Zargaryan Yu.A., Bogatyrev N.S., Malyshenko I.M. Razrabotka nechetkogo kontrollera, kak dopolneniya k sisteme «kruiz-kontrol'» // V sbornike: Teoriya i praktika imitatsionnogo modelirovaniya i sozdaniya trenazherov Penza, 2015. S. 16-20.
13. Kobzev A.A., Mishulin Yu.E., Sotskov D.A. «Avtostop» – sistema ekstrennogo tormozheniya // Avtomobil'naya promyshlennost'. 2011. №1. S. 14–16.
14. Komarov D. Yu., Revin A. A. Algoritm diagnostirovaniya bortovymi sredstvami tormoznoi sistemy avtomobilya po parametram effektivnosti // Izvestiya VolgGTU. 2011. №4 S.109-112.
15. Lokhin V.M., Zakharov V.I. Intellektual'nye sistemy upravleniya: ponyatiya, opredeleniya, printsipy postroeniya. V kn.: Intellektual'nye sistemy avtomaticheskogo upravleniya / Pod red. I.M. Makarova, V.M. Lokhina. M.: Fizmatizdat, 2001. −576 s.
16. Lyakhov S.V., Belous M.M. Kompleks dlya issledovaniya sistem aktivnoi bezopasnosti avtomobilya // Mekhatronika, avtomatizatsiya, upravlenie. 2009. №5. S. 53–58.
17. Matov V.I. i dr. Bortovye tsifrovye vychislitel'nye mashiny i sistemy. M.: Vysshaya shkola, 1988. 216 s.
18. Milushin Yu.E. Apparatnaya realizatsiya bortovoi informatsionno-upravlyayushchei sistemy transportnogo sredstva [Tekst] // Fundamental'nye issledovaniya. 2012. № 3. C. 113-119.
19. Osnovy tekhnicheskoi diagnostiki // Modeli ob''ektov, metody i algoritmy diagnoza; pod red. P.P. Parkhomenko. M.: Energiya, 1976. 464 s.
20. Parnes M. Primenenie radarnykh datchikov v avtomobile // Komponenty i tekhnologii. 2008. № 78. S. 41-44.
21. Rusinov A.S., Merkur'ev D.A., Poezzhaeva E.V. Sistema adaptivnogo kruiz-kontrolya na otechestvennye avtomobili // Aktual'nye problemy sovremennoi nauki. 2015. № 3 (82). S. 321-323.
22. Smirnov O.P., Tropina A.A. Primenenie iskusstvennogo intellekta v transportnykh sistemakh // Avtomobil' i Elektronika. Sovremennye Tekhnologii. 2013. № 2 (5). S. 34-37.
23. Sosnen D.A., Yakovlev V.F. Noveishie avtomobil'nye elektronnye sistemy. M.: SOLON-Press, 2005. 240 s.
24. Sotskov D.A., Mishulin Yu.E., Timofeeva S.I. Povyshenie effektivnosti raboty sistemy «avtostop» IRM v ekstrennykh situatsiyakh // Sostoyanie i perspektivy razvitiya sredstv razvedki i preodoleniya minno-vzryvnykh zagrazhdenii: sbornik dokladov nauchno-prakticheskoi konferentsii. FGU «15 TsNIII Minoborony Rossii». Nakhabino, 2009. S. 59–63.
25. Sysoeva S. Aktual'nye tekhnologii i primeneniya datchikov avtomobil'nykh sistem aktivnoi bezopasnosti. Chast' 7. Aktivnye IK sistemy: lidary, sistemy nochnogo videniya, 3d – kamery // Komponenty i tekhnologii. 2007. № 69. S. 19-26.
26. Terano T., Asai K.,Sugeno M. Prikladnye nechetkie sistemy. M.: Mir. 1993. 368 s.
27. Fishetti M. Navigatsiya budushchego // V mire nauki. 2008. № 2. S. 84-89.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования, представленный в статье, имеет определенный научный интерес и высокую актуальность ввиду современной имплеменатции автономных систем управления автомобилем, так как автор рассматривает бортовые информационно управляющие системы, обеспечивающие движение большегрузных автомобилей в колонне при наличии водителя только в первой машине, а также системы круиз-контроля, включая адаптивные и интеллектуальные.
Методы, которыми оперировал автор, позволили ему раскрыть заявленную тему в полном объеме, в связи с тем что в статье использовалась практическая информация, предоставленная авто-производителями, которая позволила автору раскрыть сущностное содержание бортовых информационных системы и круиз-контроля в полной мере. Также автор представил иерархическую архитектуру бортовой информационно-управляющей системы, ключевые алгоритмы и датчики для ее реализации. Исследование может вызвать большой научный и, особенно, практический интерес у читателей журнала ввиду того что автопроизводители уже интегрируют системы частичного, а в будущем, и полного автономного управления автомобилем.
Материал свидетельствует о существенной степени дополнения, преобразования и конкретизации научных знаний, так как автором была доработана модель интеллектуального круиз-контроля, обеспечивающая движение большегрузных автомобилей в колонне при наличии водителя только в первом автомобиле.
Текст статьи характеризуется логичностью, последовательностью, ясностью. Используется лексика научного стиля.
Библиография статьи не дает полного представления об исследуемой научной проблеме.
Несмотря на обширный обзор научных работ других исследователей, не создается полного представления о всестороннем видении автором проблематики в области выбранной темы. Как следствие, библиография желательно доработать.
Желательно обосновать и представить более точно выводы по новым научным результатам и практической значимости.
В списке литературы представлены некорректно:
7. Кобзев А.А., Мишулин Ю.Е., Шахнин В.А. Программная реализация системы диагностирования двигателя и шасси транспортного средства.
10. Материал по программе самообучения Audi №620 (другие данные отсутствуют). — 43 с
После доработки материал может быть рекомендован к публикации.
|
 Рус
Рус










